博客文章
浏览我们的技术文章,了解最新的机器人技术和发展动态

轨迹优化
ALM+LBFGS=混合A星终结者?
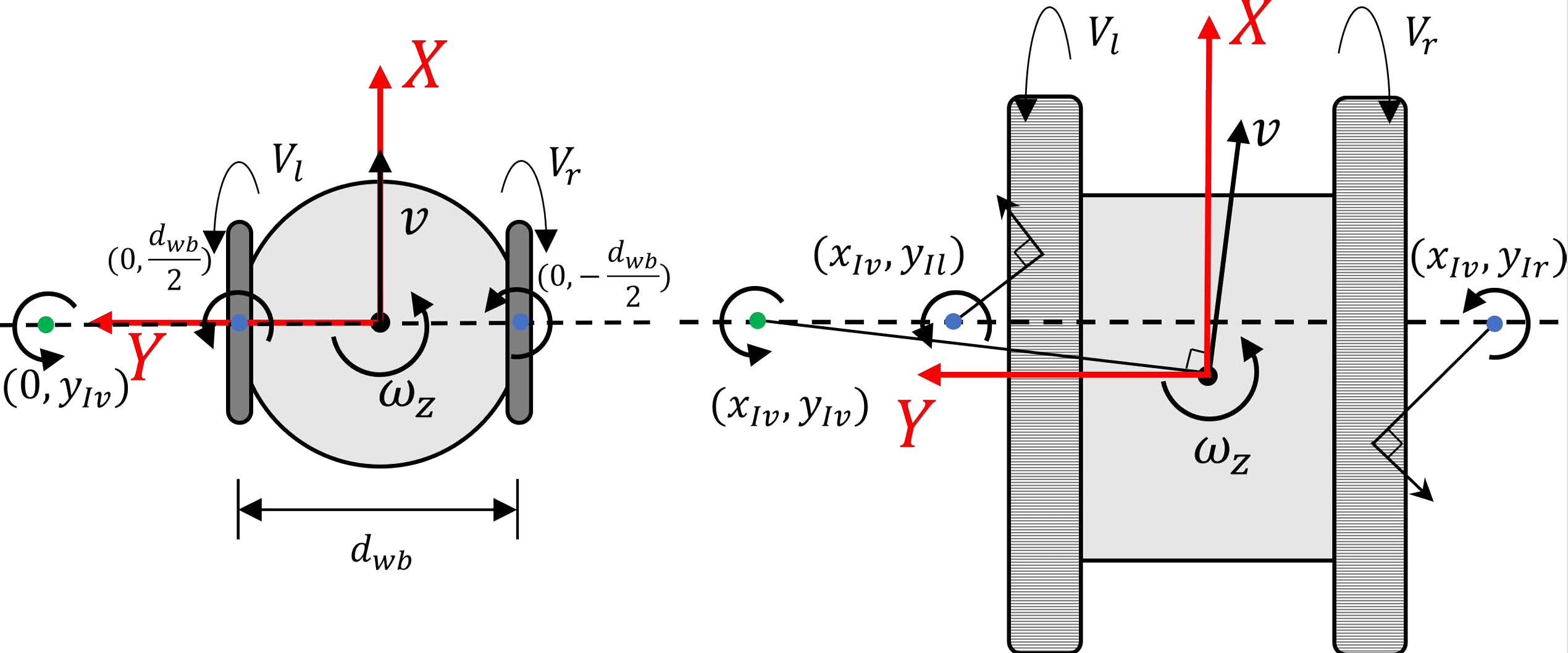
这篇论文提出了一个面向差速驱动机器人(包括轮式与履带式)的统一轨迹优化框架。作者基于瞬时旋转中心(ICR)建立通用运动学模型,并用运动状态表示法(在姿态与弧长空间构造多段多项式轨迹)使轨迹天然满足连续性和运动学约束。在约束处理上,论文创新性地结合了惩罚函数(处理速度、加速度、安全等不等式约束)与增广拉格朗日方法(仅处理终点位置等式约束),既保证了精度又提高了数值稳定性。
2026/1/17